El inellipse Steiner juega un papel especial: su área es la más grande de todas las inellipses.
Debido a que una sección cónica no degenerada está determinada únicamente por cinco vértices y tangentes, en un triángulo a cuyos tres vértices se les da uno solo se pueden especificar los puntos de contacto en dos lados. El tercer punto de contacto se determina entonces de manera única.
Representaciones paramétricas, centro, diámetros conjugados [ editar ]

Un inelipse de un triángulo está determinado únicamente por los vértices del triángulo y dos puntos de contacto.  .
.
El inellipse del triángulo con vértices.

y puntos de contacto

en  y
y  respectivamente puede ser descrito por la representación paramétrica racional
respectivamente puede ser descrito por la representación paramétrica racional

dónde  están determinados únicamente por la elección de los puntos de contacto:
están determinados únicamente por la elección de los puntos de contacto:

El tercer punto de contacto es

El centro del inellipse es

Los vectores



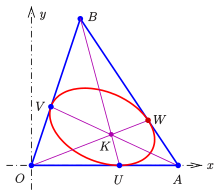
Punto de Brianchon 
El punto de Brianchon del inellipse (punto común de las lineas  ) es
) es

Variar  es una opción fácil para prescribir los dos puntos de contacto . Los límites dados paragarantice que los puntos de contacto estén ubicados a los lados del triángulo. Proporcionan para los límites
es una opción fácil para prescribir los dos puntos de contacto . Los límites dados paragarantice que los puntos de contacto estén ubicados a los lados del triángulo. Proporcionan para los límites  .
.
Observación: los parámetros no son los semiejes del inellipse ni las longitudes de dos lados.
Ejemplos [ editar ]
Steiner inellipse [ editar ]
por  los puntos de contacto
los puntos de contacto  son los puntos medios de los lados y el inellipse es el inellipse de Steiner (su centro es el centroide del triángulo).
son los puntos medios de los lados y el inellipse es el inellipse de Steiner (su centro es el centroide del triángulo).
Incircle [ editar ]
por  uno obtiene el círculo del triángulo con el centro
uno obtiene el círculo del triángulo con el centro

Mandart inellipse [ editar ]
por  el inellipse es el inelipse Mandart del triángulo. Toca los lados en los puntos de contacto de los círculos (ver diagrama).
el inellipse es el inelipse Mandart del triángulo. Toca los lados en los puntos de contacto de los círculos (ver diagrama).
Brocard inellipse [ editar ]
por  uno recibe el inellipse Brocard . Está determinado únicamente por su punto Brianchon dado en coordenadas trilineales.
uno recibe el inellipse Brocard . Está determinado únicamente por su punto Brianchon dado en coordenadas trilineales.  .
.
Derivaciones de las declaraciones [ editar ]
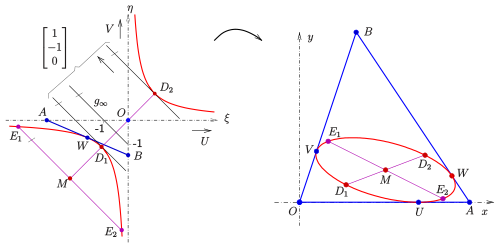
Determinación del inellipse resolviendo el problema de una hipérbola en un  -
- -plane y una transformación adicional de la solución en el plano x - y .
-plane y una transformación adicional de la solución en el plano x - y .  es el centro del inellipse buscado y
es el centro del inellipse buscado y  Dos diámetros conjugados. En ambos planos, los puntos esenciales se asignan con los mismos símbolos.
Dos diámetros conjugados. En ambos planos, los puntos esenciales se asignan con los mismos símbolos. es la línea en el infinito del plano x - y .
es la línea en el infinito del plano x - y .
- Nuevas coordenadas
Para la prueba de las declaraciones, uno considera la tarea proyectivamente e introduce un nuevo inhomogene conveniente--coordina de modo que la sección cónica deseada aparezca como una hipérbola y los puntosse convierten en los puntos en el infinito de los nuevos ejes de coordenadas. Los puntos será descrito en el nuevo sistema de coordenadas por
será descrito en el nuevo sistema de coordenadas por ![{\ displaystyle A = [a, 0], B = [0, b]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e20a3ed09ce0085040d3b2cc37c6303cc137539e) y la línea correspondiente tiene la ecuación
y la línea correspondiente tiene la ecuación  . (A continuación resultará que tienen el mismo significado introducido en la declaración anterior.) Ahora se busca una hipérbola con los ejes de coordenadas como asíntotas, que toca la línea
. (A continuación resultará que tienen el mismo significado introducido en la declaración anterior.) Ahora se busca una hipérbola con los ejes de coordenadas como asíntotas, que toca la línea  . Esta es una tarea fácil. Por un simple cálculo se obtiene la hipérbola con la ecuación
. Esta es una tarea fácil. Por un simple cálculo se obtiene la hipérbola con la ecuación . Toca la linea en el punto
. Toca la linea en el punto ![{\ displaystyle W = [{\ tfrac {a} {2}}, {\ tfrac {b} {2}}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/9b2fe07d55a71a4127507e0c14cfa001b1f1824d) .
.
- Transformación coordinada
La transformación de la solución en el plano x - y se realizará utilizando coordenadas homogéneas y la matriz.
 .
.
Un punto ![{\ displaystyle [x_ {1}, x_ {2}, x_ {3}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/51a96ce7336b520a13d666da01d29a958ba2ab0c) está mapeado en
está mapeado en

Un punto ![{\ displaystyle [\ xi, \ eta]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/03bdcaa9622ae82e479c0b910f97e3d0e992fa5d) del --plano está representado por el vector de columna
del --plano está representado por el vector de columna ![{\ displaystyle [\ xi, \ eta, 1] ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/8e0c3209483f658ed3d8d2c2af76cceb3850cdf5) (Ver coordenadas homogéneas ). Un punto en el infinito está representado por
(Ver coordenadas homogéneas ). Un punto en el infinito está representado por![{\ displaystyle [\ cdots, \ cdots, 0] ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5a472efb9e56c1741ebfa49b91fa776aa91e4b2a) .
.
- Transformación coordinada de puntos esenciales.
![{\ displaystyle U: \ [1,0,0] ^ {T} \ \ rightarrow \ (u_ {1}, u_ {2}) \, \ quad V: \ [0,1,0] ^ {T} \ \ rightarrow \ (v_ {1}, v_ {2}) \,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/6c497b1f88e79030ca93f2a180c0684334572003)
![{\ displaystyle O: \ [0,0] \ \ rightarrow \ (0,0) \, \ quad A: \ [a, 0] \ rightarrow \ (a_ {1}, a_ {2}) \, \ quad B: \ [0, b] \ rightarrow \ (b_ {1}, b_ {2}) \,}](https://wikimedia.org/api/rest_v1/media/math/render/svg/25ef40c3ddad1e9bdeb9c7591474b55851361497)
- (Uno debe considerar:
 ; véase más arriba.)
; véase más arriba.)
 es la ecuación de la línea en el infinito del plano x - y ; su punto en el infinito es
es la ecuación de la línea en el infinito del plano x - y ; su punto en el infinito es![{\ displaystyle [1, -1,0] ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d1bcd1eb14d3670f46f18d86d73a10b44175c1e7) .
.
![{\ displaystyle [1, -1, {\ color {red} 0}] ^ {T} \ \ rightarrow \ (u_ {1} -v_ {1}, u_ {2} -v_ {2}, {\ color {rojo} 0}) ^ {T}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5de3b0fd1b4aad1b8dbdb47b38fae93679184665)
De ahí el punto en el infinito de (en --plane) se asigna a un punto en el infinito del plano x - y . Eso significa: las dos tangentes de la hipérbola, que son paralelas a , también son paralelos en el plano x - y . Sus puntos de contacto son
![{\ displaystyle D_ {i}: \ left [{\ frac {\ pm {\ sqrt {ab}}} {2}}, {\ frac {\ pm {\ sqrt {ab}}} {2}} \ right ] \ \ rightarrow \ {\ frac {1} {2}} {\ frac {\ pm {\ sqrt {ab}}} {1 \ pm {\ sqrt {ab}}}} \; (u_ {1} + v_ {1}, u_ {2} + v_ {2}), \;}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7052800026aaac4c4ae076e61cd2a1cc4afa2adc)
Porque las tangentes de elipse en los puntos  son paralelos, el acorde
son paralelos, el acorde  es un diámetro y su punto medio es el centro de la elipse
es un diámetro y su punto medio es el centro de la elipse

Uno comprueba fácilmente que tiene el --coordenadas
![{\ displaystyle \ M: \; \ left [{\ frac {-ab} {2}}, {\ frac {-ab} {2}} \ right] \ ;.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4ae4ee71147e7a2b13b7d335cf7bcb81c3cef83a)
Para determinar el diámetro de la elipse, que se conjuga con , en el --plano uno tiene que determinar los puntos comunes  de la hipérbola con la línea a través paralela a las tangentes (su ecuación es
de la hipérbola con la línea a través paralela a las tangentes (su ecuación es  ) Uno consigue
) Uno consigue ![{\ displaystyle E_ {i}: \ left [{\ tfrac {-ab \ pm {\ sqrt {ab (ab-1)}}} {2}}, {\ tfrac {-ab \ mp {\ sqrt {ab (ab-1)}}} {2}} \ right]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/a770d90aaa18c9e0928f1342be65ab53c1df35ec) . Y en x - y -coordenadas:
. Y en x - y -coordenadas:

De los dos diámetros conjugados  se pueden recuperar los dos medios diámetros conjugados vectoriales
se pueden recuperar los dos medios diámetros conjugados vectoriales
![{\ displaystyle {\ begin {alineado} {\ vec {f}} _ {1} & = {\ vec {MD_ {1}}} = {\ frac {1} {2}} {\ frac {\ sqrt { ab}} {ab-1}} \; (u_ {1} + v_ {1}, u_ {2} + v_ {2}) \\ [6pt] {\ vec {f}} _ {2} & = {\ vec {ME_ {1}}} = {\ frac {1} {2}} {\ sqrt {\ frac {ab} {ab-1}}} \; (u_ {1} -v_ {1}, u_ {2} -v_ {2}) \; \ end {alineado}}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/051c4b96e2a66a70990e8af3c4faad92bcb65026)
y al menos la representación paramétrica trigonométrica del inellipse:
Análogamente al caso de una elipse de Steiner, se pueden determinar semiejes, excentricidad, vértices, una ecuación en coordenadas x - y y el área del inelipse.
El tercer punto de contacto  en
en  es:
es:
![{\ displaystyle W: \ left [{\ frac {a} {2}}, {\ frac {b} {2}} \ right] \ \ rightarrow \ \ left ({\ frac {u_ {1} a + v_ {1} b} {a + b + 2}} \;, \; {\ frac {u_ {2} a + v_ {2} b} {a + b + 2}} \ right) \ ;.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/4c12e425cfa9038ab72d6f9ccd25447915a5aa0f)
El punto Brianchon del inellipse es el punto común. de las tres líneas . En el--plano estas líneas tienen las ecuaciones:  . De ahí el punto tiene las coordenadas:
. De ahí el punto tiene las coordenadas:
![{\ displaystyle K: \ [a, b] \ \ rightarrow \ \ left ({\ frac {u_ {1} a + v_ {1} b} {a + b + 1}} \;, \; {\ frac {u_ {2} a + v_ {2} b} {a + b + 1}} \ right) \.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/25a6a51aecf46a39ee8a67c88ebd39922423804e)
Transformando la hipérbola  produce la representación paramétrica racional del inellipse:
produce la representación paramétrica racional del inellipse:
![{\ displaystyle \ left [\ xi, {\ frac {ab} {4 \ xi}} \ right] \ \ rightarrow \ \ left ({\ frac {4u_ {1} \ xi ^ {2} + v_ {1} ab} {4 \ xi ^ {2} +4 \ xi + ab}}, {\ frac {4u_ {2} \ xi ^ {2} + v_ {2} ab} {4 \ xi ^ {2} +4 \ xi + ab}} \ right) \, \ - \ infty <\ xi <\ infty \.}](https://wikimedia.org/api/rest_v1/media/math/render/svg/3c3a222e4fc60737d44af7ad7fd5c611518d1cec)
- Rodear
Para el incircle hay  , que es equivalente a
, que es equivalente a
- (1)
 Adicionalmente
Adicionalmente - (2)
 . (ver diagrama)
. (ver diagrama)
Resolviendo estas dos ecuaciones para uno consigue
- (3)

Para obtener las coordenadas del centro, primero se calcula usando (1) y (3)

Por lo tanto

- Mandart inellipse
Los parametros para el inelipse Mandart se puede recuperar de las propiedades de los puntos de contacto (ver de: Ankreis ).
- Brocard inellipse
El inelipse Brocard de un triángulo está determinado únicamente por su punto Brianchon dado en coordenadas trilineales. . [1] Cambiar las coordenadas trilineales en la representación más conveniente (ver coordenadas trilineales ) rendimientos
(ver coordenadas trilineales ) rendimientos . Por otro lado, si los parámetros de un inellipse, se calcula a partir de la fórmula anterior para :
. Por otro lado, si los parámetros de un inellipse, se calcula a partir de la fórmula anterior para :  . Igualar ambas expresiones para
. Igualar ambas expresiones para y resolviendo para rendimientos
y resolviendo para rendimientos

Inellipse con la mayor área [ editar ]
- El inellipse Steiner tiene el área más grande de todos los inellipses de un triángulo.
- Prueba
Del teorema de Apollonios sobre las propiedades de los semi-diámetros conjugados de una elipse se obtiene:
de una elipse se obtiene:
 (Ver artículo sobre elipse Steiner ).
(Ver artículo sobre elipse Steiner ).
Para el inellipse con parámetros uno consigue

-
-
-

dónde  .Para omitir las raíces, es suficiente investigar los extremos de la función
.Para omitir las raíces, es suficiente investigar los extremos de la función :
:

Porque  se obtiene a partir del intercambio de s y t :
se obtiene a partir del intercambio de s y t :

Solución de ambos equatiions para s y t rendimientos
 cuales son los parámetros del Steel inellipse.
cuales son los parámetros del Steel inellipse.







No hay comentarios:
Publicar un comentario