Mecánica routhiana
la mecánica routhiana es una formulación híbrida de mecánica lagrangiana y la Mecánica hamiltoniana desarrollada por Edward John Routh. De la misma manera , el routhiano es la función que reemplaza a ambas las funciones lagrangianas y hamiltonianas.
El Routhiano, como el hamiltoniano, puede ser obtenido de un Transformada de Legendre del lagrangiano, y tiene una forma matemática similar al hamiltoniano, pero no es exactamente igual. La diferencia entre el lagrangiano, hamiltoniano, y routhiano son sus variables . Para un conjunto dado de Coordenadas generalizadas representando los grados de libertad en el sistema, el lagrangiano es una función de las coordenadas y velocidades, mientras el hamiltoniano es una función de las coordenadas y momentos.
El routhiano difiere de estas funciones en que algunas coordenadas están escogidas para tener correspondientes velocidades generalizadas, el resto para tener correspondientes momentos generalizados. Esta elección es arbitraria, y puede ser hecha para simplificar el problema. También tiene la consecuencia de que las ecuaciones de routh son exactamente las ecuaciones hamiltonianas para algunas coordenadas y sus momentos correspondientes, y las ecuaciones lagrangianas para el resto de las coordenadas y sus velocidades. En este caso las funciones lagrangianas y hamiltonianas están reemplazadas por una única función, el routhiano. El conjunto total tiene así las ventajas de ambos conjuntos de ecuaciones, con la comodidad de partir un conjunto de coordenadas a las ecuaciones hamiltonianas, y el resto a las ecuaciones lagrangianas.
A menudo la aproximación routhiana puede no ofrecer ninguna ventaja nueva, pero un caso notable donde esto es útil es cuándo un sistema tiene coordenadas cíclicas (también llamadas "coordenadas ignorables"), por definición aquellas coordenadas no aparecen en el lagrangiano original. Las ecuaciones lagrangianas son resultados poderosos , utilizadas frecuentemente en teoría y práctica, ya que las ecuaciones del movimiento son fácil de establecer en las coordenadas. Aun si hay coordenadas cíclicas todavía habrá ecuaciones por resolver para todas las coordenadas, incluyendo las cíclicas a pesar de su ausencia en el lagrangiano. Las ecuaciones hamiltonianas son resultados teóricos útiles , pero menos útiles en la práctica porque las coordenadas y los momentos están relacionados juntos en las soluciones - después de solucionar las ecuaciones las coordenadas y los momentos tienen que ser eliminados uno del otro. No obstante, las ecuaciones hamiltonianas son perfectamente convenientes para coordenadas cíclicas porque las ecuaciones en las coordenadas cíclicas desaparecen trivialmente, dejando sólo las ecuaciones en las coordenadas no cíclicas.
La aproximación routhiana tiene lo mejor de ambas aproximaciones, porque las coordenadas pueden ser separadas hacia las ecuaciones hamiltonianas y eliminadas, dejando detrás las coordenadas no cíclicas para ser solucionadas a partir de las ecuaciones lagrangianas. En general menos ecuaciones necesitan ser solucionadas comparada con la aproximación lagrangiana. Además, el método routhiano hace más claro las interpretaciones físicas de las constantes asociadas con coordenadas cíclicas, en la aproximación lagrangiana las constantes son menos obvias.
Con el resto de mecánica analítica, la mecánica routhiana es completamente equivalente a la mecánica newtoniana, y a otras formulaciones de mecánica clásica, y no introduce física nueva. Ofrece una manera alternativa de solucionar problemas mecánicos.
Definiciones
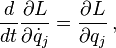
En el caso de la mecánica langrariana,el langrariano es función de las coordenadas generalizadas q1, q2, ... , las correspondientes velocidades dq1/dt, dq2/dt, ...,y posiblemente el tiempo t,

donde los puntos por encima denotan derivadas con respecto al tiempo.
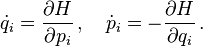
En mecánica hamiltoniana, las coordenadas generalizadas q1, q2, ... y los correspondientes momentos generalizadas p1, p2, ..., y posiblemente el tiempo, forman al hamiltoniano

donde la segunda ecuación es la definición del momento generalizado pi de la coordenada qi (derivadas parciales son denotadas usando ∂). Las velocidades dqi/dt son expresadas como funciones de sus momentos correspondientes al invertir la relación que las define . En este contexto ,se dice que pi es el momento "canónicamente conjugado" de qi.
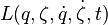
El routhiano es intermedio entre L y H; algunas coordenadas q1, q2, ..., qn son elegidas para tenefr el correspondiente momento generalizado p1, p2, ..., pn, el resto de las coordenadas ζ1, ζ2, ..., ζs para tener velocidades generalizadas dζ1/dt, dζ2/dt, ..., dζs/dt y el tiempo puede aparecer explícitamente; 1 2
donde otra vez la velocidad generalizada dqi/dt es expresada como función del momento generalizado pi via su relación de definición. La elección de cuales ncoordenadas tendrán el correspondiente momento, dentro de las n + s coordenadas es arbitraria.
Lo anterior es utilizado por Landau y Lifshitz, y Goldstien. Algunos autores pueden definir el routhiano para ser el negativo de la definición anterior.3
Dada la longitud de la definición general,una notación más compacta utiliza negritas para n-adas (o vectores) de las variables, así q = (q1, q2, ..., qn), ζ = (ζ1, ζ2, ..., ζs),p = (p1, p2, ..., pn), y d ζ/dt = (dζ1/dt, dζ2/dt, ..., dζs/dt), de manera que

donde · Es el producto de punto definido en n-adas, para el ejemplo concreto que aparece aquí:

Ecuaciones de movimiento
Para referencia, las ecuaciones lagrangianas para s los grados de libertad son un conjunto de s ecuaciones diferenciales normales de segundo orden acopladas en las coordenadas
donde j = 1, 2, ..., s = 1, 2n, ..., j = 1, 2, ..., s, y las ecuaciones hamiltonianas para n los grados de libertad son un conjunto de 2n ecuaciones diferenciales ordinarioas de primer orden acopladas en las coordenadas y momentos
Abajo, las ecuaciones de movimiento routhianas están obtenidas en dos maneras, en el proceso otras derivadas útiles son encontradas que pueden ser utilizadas en otro lugar.
Dos grados de libertad
Considere el caso de un sistema con dos grados de libertad, q y ζ, con velocidades generalizadas dq/dt y dζ/dt, y el lagrangiano dependiente del tiempo. (La generalización a cualquier número de los grados de libertad sigue exactamente el mismo procedimiento como con dos).4 El lagrangiano del sistema tendrá la forma
El diferencial de L es

Ahora cambie las variables, del conjunto (q, ζ, dq/dt, dζ/dt) a (q, ζ, p, dζ/dt), sencillamente cambiando la velocidad dq/dt al momento p. Este cambio de variables en los diferenciales es la transformación de Legendre. EL diferencial de la función nueva para reemplazar L será una suma de diferenciales en dq, dζ, dp, d(dζ/dt), y dt. Utilizando la definición de la ecuación de Lagrange y momento generalizados para la coordenada q:

Tenemos

Y para reemplazar pd(dq/dt) por (dq/dt)dp, recordar la regla de producto para diferenciales, y sustuirnb 1

Para obtener el diferencial de una función nueva en términos del conjunto nuevo de variables:

Introduciendo el routhiano

donde otra vez la velocidad dq/dt es una función del momento p, tenemos

Pero de la definición anterior, el diferencial del Routhian es

Comparando los coeficientes de los diferenciales dq, dζ, dp, d(dζ/d(dζ/dt)), y dt, los resultados son ecuaciones de hamilton para la coordenada q,
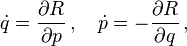
Y la ecuación de Lagrange para la coordenada ζ

que sigue de

Y tomando la derivada total del tiempo total de la segunda ecuación y equiparando a la primera. Nótese que el routhiano reemplaza las funciones hamiltonianas y lagrangianas en todas las ecuaciones de movimiento.
La ecuación Restante declara las derivadas parciales respecto al tiempo de L y R son negativas entre sí
Cualquier número de grados de libertad
Para n + s n + s n + s coordenadas como se definió encima, con el routhiano

Las ecuaciones de movimiento pueden ser obtenidas por una transformación de Legendre de este routhiano como en la sección anterior, pero otra manera es sencillamente tomar las derivadas parciales de R con respecto a las coordenadas qiqi y ζζj, momentos pi pi, y velocidades dζj/dt, donde i = 1, 2, ..., n, y j = 1, 2, ..., s. Las derivadas son:




Las primeras dos son identicas a las ecuaciones hamiltonianas. Equiparando la derivada total con respecto al tiempo del cuarto conjunto de ecuaciones con el tercero (para cada valor de j) da las ecuaciones lagrangianas. El quinto es justo la misma relación entre derivadas parciales del tiempo de antes. Para resumir5
El número total de ecuaciones es 2n + s, donde 2n son ecuaciones hamiltonianas y s ecuaciones langrarianas.
Número adimensional
Número adimensional es un número que no tiene unidades físicas que lo definan y por lo tanto es un número puro. Los números adimensionales se definen como productos o cocientes de cantidades que sí tienen unidades de tal forma que todas éstas se simplifican. Dependiendo de su valor estos números tienen un significado físico que caracteriza unas determinadas propiedades para algunos sistemas.
Teorema π de Vaschy-Buckingham
De acuerdo al Teorema π de Vaschy-Buckingham de análisis dimensional, la dependencia funcional entre un cierto número de variables (n) puede ser reducida en elnúmero de dimensiones independientes de esas n variables (k) para dar un número de cantidades adimensionales independientes (p = n - k). Así diferentes sistemas son equivalentes cuando tienen la misma descripción mediante números adimensionales.
Lista de números adimensionales
Existe una gran cantidad de números adimensionales, algunos de los más utilizados se listan aquí alfabéticamente.
| Nombre | Campo de aplicación |
|---|---|
| Número de Abbe | óptica (dispersión en materiales ópticos) |
| Número de Arquímedes | movimiento de fluidos debido a diferencias de densidad |
| Número de Bagnold | flujo de granos, arena, etc. |
| Número de Biot | conductividad superficial vs. volumétrica de sólidos |
| Número de Bodenstein | distribución del tiempo de residencia |
| Número de Bond | fuerza capilar debido a la flotación |
| Número de Brinkman | transferencia de calor por conducción entre una superficie y un líquido viscoso |
| Número de Brownell Katz | combinación del número de capilaridad y el número de Bond |
| Número de Capilaridad | flujo debido a la tensión superficial |
| Número de Courant-Friedrich-Levy | resolución numérica de ecuaciones diferenciales |
| Número de Damköhler | escala de tiempo de un reacción química vs. el fenómeno de transporte |
| Número de Dean | vórtices en tuberías curvas |
| Número de Deborah | reología de los fluidos viscoelásticos |
| Número de Eckert | transferencia de calor por convección |
| Número de Ekman | geofísica (fuerzas de rozamiento por viscosidad) |
| Número de Eötvös | determinación de la forma de la burbuja/gota |
| Número de Euler | hidrodinámica (fuerzas de presión vs. fuerzas inerciales) |
| Número de Foppl–von Karman | pandeo de cáscaras delgadas |
| Número de Fourier | transferencia de calor |
| Número de Fresnel | difracción |
| Número de Froude | fuerzas inerciales vs. gravitacionales en fluidos |
| Número de Galilei | flujo viscoso debido a la gravedad |
| Número de Graetz | flujo de calor |
| Número de Grashof | convección natural |
| Número de Hagen | convección forzada |
| Número de Karlovitz | combustión turbulenta |
| Número de Knudsen | aproximación del continuo en fluidos |
| Número de Laplace | convección natural en fluidos con mezclabilidad |
| Número de Lewis | difusión molecular vs. difusión térmica |
| Número de Mach | dinámica de los gases (velocidad del gas vs. velocidad del sonido) |
| Número de Reynolds magnético | magnetohidrodinámica |
| Número de Marangoni | Flujo de Marangoni |
| Número de Morton | determinación de la forma de la burbuja/gota |
| Número de Nusselt | transferencia de calor con convección forzada |
| Número de Ohnesorge | atomización de líquidos, flujo de Marangoni |
| Número de Péclet | problemas de advección–difusión |
| Número de Peel | adhesión de microestructuras sobre sustratos |
| Número de Prandtl | convección forzada y natural |
| Número de Rayleigh | fuerzas de flotación y viscosas en convección natural |
| Número de Reynolds | fuerzas de inercia vs. viscosas en fluidos |
| Número de Richardson | efecto de la flotación en la estabilidad de los flujos |
| Número de Rossby | fuerzas inerciales en geofísica |
| Número de Schmidt | dinámica de fluidos (transferencia de masa y difusión) |
| Número de Sherwood | transferencia de masa y convección forzada |
| Número de Sommerfeld | lubricación de bordes |
| Número de Stanton | transferencia de calor con convección forzada |
| Número de Stefan | transferencia de calor durante cambios de fase |
| Número de Stokes | dinámica de la partícula |
| Número de Strouhal | flujos continuos y pulsantes |
| Número de Taylor | flujos rotacionales |
| Número de Wagner | Electrodeposiciones |
| Número de Weber | flujos multifásicos sobre superficies curvas |
| Número de Weissenberg | flujos viscoelásticos |
| Número de Womersley | flujos continuos y pulsantes |
No hay comentarios:
Publicar un comentario