Análisis del equilibrio

La estática proporciona, mediante el empleo de la mecánica del sólido rígido, solución a los problemas denominados isostáticos. En estos problemas, es suficiente plantear las condiciones básicas de equilibrio, que son:
- El resultado de la suma de fuerzas es nulo.
- El resultado de la suma de momentos respecto a un punto es nulo.
- Estas dos condiciones, mediante el álgebra vectorial, se convierten en un sistema de ecuaciones; la resolución de este sistema de ecuaciones es la solución de la condición de equilibrio.
- Existen métodos de resolución de este tipo de problemas estáticos mediante gráficos, heredados de los tiempos en que la complejidad de la resolución de sistemas de ecuaciones se evitaba mediante la geometría, si bien actualmente se tiende al cálculo por ordenador.
Para la resolución de problemas hiperestáticos (aquellos en los que el equilibrio se puede alcanzar con distintas combinaciones de esfuerzos) es necesario considerar ecuaciones de compatibilidad. Dichas ecuaciones adicionales de compatibilidad se obtienen mediante la introducción de deformaciones y tensiones internas asociadas a las deformaciones mediante los métodos de la mecánica de sólidos deformables, que es una ampliación de la mecánica del sólido rígido que, además, da cuenta de la deformabilidad de los sólidos y sus efectos internos.
Existen varios métodos clásicos basados en la mecánica de sólidos deformables, como los teoremas de Castigliano o las fórmulas de Navier-Bresse.
Suma de fuerzas
Cuando sobre un cuerpo o sólido rígido actúan varias fuerzas que se aplican en el mismo punto, el cálculo de la fuerza resultante resulta trivial: basta sumarlas vectorialmente y aplicar el vector resultante en el punto común de aplicación.
Sin embargo, cuando existen fuerzas con puntos de aplicación diferentes es necesario determinar el punto de aplicación de la fuerza resultante. Para fuerzas no paralelas esto puede hacerse sumando las fuerzas dos a dos. Para ello se consideran dos de las fuerzas que trazan rectas prolongando las fuerzas en ambos sentidos y buscando su intersección. Esa intersección será un punto de paso de la fuerza suma de las dos. A continuación se substituyen las dos fuerzas por una única fuerza vectorial suma de las dos anteriores aplicada en el punto de intersección. Esto se repite n-1 veces para un sistema de n fuerzas y se obtiene el punto de paso de la resultante. En el caso límite del que se tengan n fuerzas paralelas puede emplearse el polígono funicular para hallar el punto de paso de la resultante.
Aplicaciones
Por esta cuestión es que la estática resulta ser una materia indispensable en carreras y trabajos como los que llevan a cabo la ingeniería estructural, mecánica y de construcción, ya que siempre que se quiera construir una estructura fija, como ser, un edificio, en términos un poco más extendidos, los pilares de un rascacielos, o la viga de un puente, será necesario e indiscutible su participación y estudio para garantizar la seguridad de aquellos que luego transiten por las mencionadas estructuras.
La estática abarca el estudio del equilibrio tanto del conjunto como de sus partes constituyentes, incluyendo las porciones elementales de material.
Uno de los principales objetivos de la estática es la obtención de esfuerzos cortantes, fuerza normal, de torsión y momento flector a lo largo de una pieza, que puede ser desde una viga de un puente o los pilares de un rascacielos.
Su importancia reside en que una vez trazados los diagramas y obtenidas sus ecuaciones, se puede decidir el material con el que se construirá, las dimensiones que deberá tener, límites para un uso seguro, etc., mediante un análisis de materiales. Por tanto, resulta de aplicación en ingeniería estructural, ingeniería mecánica, construcción, siempre que se quiera construir una estructura fija. Para el análisis de una estructura en movimiento es necesario considerar la aceleración de las partes y las fuerzas resultantes.
El estudio de la Estática suele ser el primero dentro del área de la ingeniería mecánica, debido a que los procedimientos que se realizan suelen usarse a lo largo de los demás cursos de ingeniería mecánica.
Sólidos y análisis estructural
La estática se utiliza en el análisis de las estructuras, por ejemplo, en arquitectura e ingeniería estructural y la ingeniería civil. La resistencia de los materiales es un campo relacionado de la mecánica que depende en gran medida de la aplicación del equilibrio estático. Un concepto clave es el centro de gravedad de un cuerpo en reposo, que constituye un punto imaginario en el que reside toda la masa de un cuerpo. La posición del punto relativo a los fundamentos sobre los cuales se encuentra un cuerpo determina su estabilidad a los pequeños movimientos. Si el centro de gravedad se sitúa fuera de las bases y, a continuación, el cuerpo es inestable porque hay un par que actúa: cualquier pequeña perturbación hará caer al cuerpo. Si el centro de gravedad cae dentro de las bases, el cuerpo es estable, ya que no actúa sobre el par neto del cuerpo. Si el centro de gravedad coincide con los fundamentos, entonces el cuerpo se dice que es metaestable.
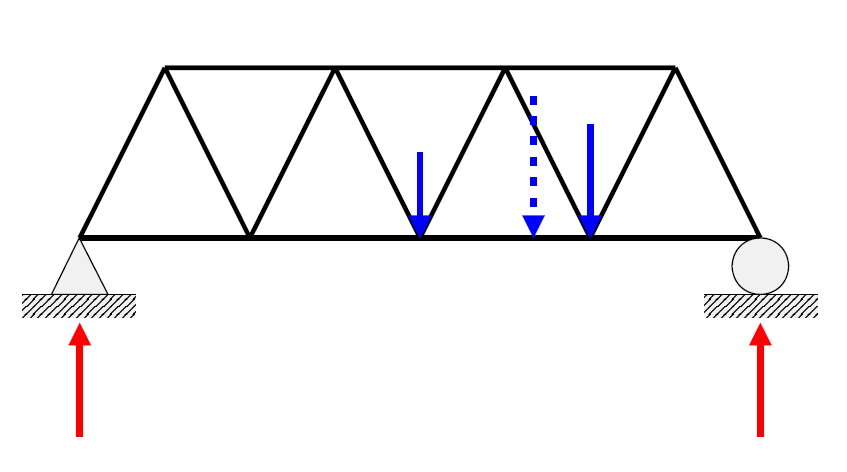
Para poder saber el esfuerzo interno o la tensión mecánica que están soportando algunas partes de una estructura resistente, pueden usarse frecuentemente dos medios de cálculo:
- La comprobación por nudos.
- La comprobación por secciones.
Para lograr obtener cualquiera de estas dos comprobaciones se debe tomar en cuenta la sumatoria de fuerzas externas en la estructura (fuerzas en x y en y), para luego comenzar con la comprobación por nudos o por sección. Aunque en la práctica no siempre es posible analizar una estructura resistente exclusivamente mediante las ecuaciones de la estática, y en esos casos deben usarse métodos más generales de resistencia de materiales, teoría de la elasticidad, mecánica de sólidos deformables y técnicas numéricas para resolver las ecuaciones a las que esos métodos llevan, como el popular método de los elementos finitos.
sistema de referencia inercial es un sistema de referencia en el que las leyes del movimiento cumplen las leyes de Newton y, por tanto, la variación del momento lineal del sistema es igual a las fuerzas reales sobre el sistema, es decir un sistema en el que:

En cambio la descripción newtoniana de un sistema no-inercial requiere la introducción de fuerzas ficticias o inerciales de tal manera que:

Esto lleva a una definición alternativa, un sistema inercial es aquel en que el movimiento de las partículas puede describirse empleando sólo fuerzas reales sin necesidad de considerar fuerzas ficticias.
El concepto de sistema de referencia inercial también es aplicable a teorías más generales que la mecánica newtoniana. Así, en la teoría de la relatividad especialtambién se pueden introducir los sistemas inerciales. Aunque en relatividad especial la caracterización matemática no coincide con la que se da en mecánica newtoniana, debido a que la segunda ley de Newton, tal como la formuló, no se cumple en la Teoría de la relatividad. El concepto de sistema de referencia no fue establecido hasta dos siglos después de la formulación de las leyes de Newton (1687), cuando Ludwig Lange (1885) introdujo el concepto en un intento de eliminar la necesidad de un espacio y un tiempo absolutos del tipo que Newton conjeturaba. Estas ideas fueron, poco más tarde, consideradas en la formulación de la teoría de la relatividad especial.
Sistemas de referencia inerciales y no inerciales
Las leyes de Newton constituyeron un éxito intelectual notable que podían explicar una amplia variedad de sistemas reales. En esos sistemas las fuerzas que ejercen las partículas entre sí satisfacen dichas leyes. Sin embargo, existen sistemas acelerados o en rotación donde las leyes de Newton aplicadas a las fuerzas ejercidas por las partículas no se cumplen estrictamente. Los sistemas de referencia inerciales son aquellos en los que se cumplen las leyes de Newton usando sólo las fuerzas reales (no ficticias) que ejercen entre sí las partículas del sistema.
Los sistemas de referencia no inerciales pueden tratarse siguiendo dos posibilidades lógicas:
- Introduciendo las llamadas fuerzas ficticias o inerciales, que no son realizadas concretamente por ninguna partícula y tiene que ver con la rotación o aceleración del origen del sistema de referencia.
- Generalizando las leyes de Newton a una forma más general que pueda ser aplicable a cualquier sistema de referencia. Esta segunda posibilidad es precisamente el camino que siguieron formulaciones más generales de la mecánica clásica como la mecánica lagrangiana y la mecánica hamiltoniana.
La existencia de esta segunda posibilidad lleva a buscar una caracterización más general de los sistemas de referencia inerciales, que sea lógicamente dependiente de las leyes de Newton. De hecho, en mecánica clásica y teoría de la relatividad especial, los sistemas inerciales pueden ser caracterizados de forma muy sencilla: un sistema inercial es aquel en el que los símbolos de Christoffel obtenidos a partir de la función lagrangiana se anulan.
En un sistema inercial no aparecen fuerzas ficticias para describir el movimiento de las partículas observadas, y toda variación de la trayectoria tiene que tener una fuerza real que la provoca.
Características de los sistemas inerciales
- El punto de referencia es arbitrario, dado un sistema de referencia inercial, cualquier otro sistema desplazado respecto al primero a una distancia fija sigue siendo inercial.
- La orientación de los ejes es arbitraria, dado un sistema de referencia inercial, cualquier otro sistema de referencia con otra orientación distinta del primero, sigue siendo inercial.
- Desplazamiento a velocidad lineal constante, dado un sistema de referencia inercial, cualquier otro que se desplace con velocidad lineal y constante, sigue siendo inercial.
Por combinación de los tres casos anteriores, tenemos que cualquier sistema de referencia desplazado respecto a uno inercial, girado y que se mueva a velocidad lineal y constante, sigue siendo inercial.
Sistemas de referencia no inerciales
- Dado un sistema de referencia inercial, cualquier otro que se mueva con aceleración lineal respecto al primero es no inercial.
- Dado un sistema de referencia inercial, cualquier otro cuyos ejes roten, con velocidad de rotación constante o variable, respecto a los del primero, es no inercial.
Un sistema en rotación o moviéndose con aceleración respecto a un sistema inercial da lugar a un sistema de referencia no inercial, y en él no se cumplen las leyes de Newton. En un sistema no inercial, para justificar el movimiento, además de las fuerzas reales necesitamos, introducir fuerzas ficticias que dependen del tipo de no inercialidad del sistema.
Estas fuerzas no son ejercidas por ningún cuerpo y en consecuencia la tercera ley de Newton no se aplica en todas aquellas fuerzas ficticias introducidas por un observador no inercial. Algunas fuerzas ficticias o de inercia son la fuerza de Coriolis y la fuerza centrífuga.
Sistemas inerciales en mecánica newtoniana
En mecánica newtoniana los sistemas inerciales son aquellos que verifican las leyes de Newton. En un sistema no inercial las leyes de Newton no se cumplen para las fuerzas reales, y las leyes de Newton no son aplicables a menos que se introduzcan las llamadas fuerzas ficticias. Por tanto, en el marco de la mecánica newtoniana la clase de los sistemas de referencia inerciales coincide con la clase de los sistemas en los que se satisfacen las leyes de Newton.
Para ver esto último necesitamos considerar un sistema físico aislado y un sistema de referencia donde se cumplan las leyes de Newton para cada una de las partículas, es decir en él se cumple que:

Siendo vi la velocidad de la partícula respecto al sistema de referencia escogido y Fi la suma de fuerzas reales (no ficticias) sobre la partícula. Para probar la equivalencia de cumplimiento de leyes de Newton e inercialidad de los sistemas de referencia tenemos que probar dos implicaciones diferentes:
- En primer lugar, necesitamos comprobar que si el segundo sistema de referencia se traslada respecto al primero con velocidad uniforme o es fijo respecto al primero pero está separado una distancia constante, entonces en él se cumplen las ecuaciones de Newton.
- En segundo lugar, necesitamos probar que si en el segundo sistema se cumplen también las leyes de Newton entonces este sistema o es fijo respecto al primero o se desplaza con velocidad uniforme respecto al primero.
 En primer lugar, necesitamos comprobar que si el segundo sistema de referencia se traslada respecto al primero con velocidad uniforme o es fijo respecto al primero pero está separado una distancia constante, entonces en él se cumplen las ecuaciones de Newton.
En primer lugar, necesitamos comprobar que si el segundo sistema de referencia se traslada respecto al primero con velocidad uniforme o es fijo respecto al primero pero está separado una distancia constante, entonces en él se cumplen las ecuaciones de Newton. En segundo lugar, necesitamos probar que si en el segundo sistema se cumplen también las leyes de Newton entonces este sistema o es fijo respecto al primero o se desplaza con velocidad uniforme respecto al primero.
En segundo lugar, necesitamos probar que si en el segundo sistema se cumplen también las leyes de Newton entonces este sistema o es fijo respecto al primero o se desplaza con velocidad uniforme respecto al primero.
Para la primera parte consideremos un sistema cuyas coordenadas respecto al primero vienen dadas por:

Donde:
- es la separación inicial del origien de coordenadas de ambos sistemas.
- es la velocidad de traslación de ambos sistemas.
 es la separación inicial del origien de coordenadas de ambos sistemas.
es la separación inicial del origien de coordenadas de ambos sistemas. es la velocidad de traslación de ambos sistemas.
es la velocidad de traslación de ambos sistemas.
En este segundo sistema tendremos por tanto que las leyes de movimiento vienen dadas por:

Por tanto, si un segundo sistema se traslada con velocidad uniforme o está fijo respecto a un primer sistema inercial, en él se cumplen también las leyes de Newton (obsérvese, sin embargo, que hemos hecho el supuesto implícito de que las fuerzas sólo dependen de las distancias relativas; si este supuesto no se cumple entonces no necesariamente se cumplen las leyes de Newton para fuerzas dependientes de la velocidad).
La segunda parte es un poco más largo de probar ya que es necesario comprobar que si se cumplen simultáneamente las ecuaciones:

Entonces existe una transformación de coordenadas, que relaciona las coordenadas del primer y segundo sistema y que esta transformación es una transformación de Galileo, es decir, que ese cambio de coordenadas representa que las coordenadas de uno de los sistemas referido al otro, puede representarse como una traslación uniforme (o en su defecto ambos sistemas permanecen fijos unos respecto al otro). Esto puede probarse al igual que antes para sistemas en el que las fuerzas dependen solamente de las distancias entre partículas.
Los siguientes test permiten reconocer si un sistema no es inercial:
- En un sistema inercial se cumplen las leyes de Newton aplicadas a las fuerzas reales.
- En un sistema de referencia no inercial no hay conservación del momento lineal.
- El sistema en consideración se mueve con velocidad uniforme respecto a otro del que sabemos que es inercial.
Sistemas inerciales en mecánica relativista
En teoría de la relatividad especial, se tiene un sistema S de coordenadas y un sistema S' de coordenadas , de aquí las ecuaciones que describen la transformación de un sistema a otro son:
 y un sistema S' de coordenadas
y un sistema S' de coordenadas  , de aquí las ecuaciones que describen la transformación de un sistema a otro son:
, de aquí las ecuaciones que describen la transformación de un sistema a otro son:
donde a:

es el llamado factor de Lorentz y es la velocidad de la luz en el vacío. Puede verse que para velocidades muy inferiores a la de la luz, se cumple que:
 es la
es la 
con lo que obtenemos la transformación de Galileo y por lo tanto un sistemas inerciales en mecánica newtoniana, visto en la sección anterior.
Puede probarse que el conjunto de sistemas inerciales forma un grupo decaparamétrico que incluye las traslaciones y las rotaciones. En todos los sistemas en que la métrica toma la forma anterior las ecuaciones fundamentales de la física se escriben de la misma forma, coincidiendo además su límite clásico con las expresiones de la mecánica newtoniana. En un sistema de referencia inercial relativista la ecuación del movimiento de una partícula puede expresarse como:

Donde es el tiempo propio y las coordenadas espacio-temporales y las fuerzas que aparecen en el miembro de la derecha son fuerzas reales y por tanto están causadas por la interacción con el campo creado por otras partículas.
 es el
es el  las coordenadas espacio-temporales y las fuerzas que aparecen en el miembro de la derecha son fuerzas reales y por tanto están causadas por la interacción con el campo creado por otras partículas.
las coordenadas espacio-temporales y las fuerzas que aparecen en el miembro de la derecha son fuerzas reales y por tanto están causadas por la interacción con el campo creado por otras partículas.
En cambio en un sistema de referencia no-inercial que use las coordenadas generalizadas no incerciales la ecuación del movimiento expresada en términos de los símbolos de Christoffel viene dada por la ecuación más compleja:
 la ecuación del movimiento expresada en términos de los
la ecuación del movimiento expresada en términos de los 
En donde se ha usado el convenio de sumación de Einstein sobre índices repetidos. A partir de la ecuación anterior tenemos que la resultante de las fuerzas ficticias en relatividad, que normalmente depende de las velocidades viene dadas por:

En teoría general de la relatividad en principio no es posible encontrar sistemas de referencia inerciales en el sentido anterior, debido a que la curvatura del espacio-tiempo no es idénticamente nula. Sin embargo, siempre es posible anular en al menos un punto las fuerzas ficticias recurriendo a un sistema de coordenadas en el que los símbolos de Christoffel se anulen en el punto.
No hay comentarios:
Publicar un comentario