«Biomecánica»
La ley cuadrático-cúbica es un principio matemático-geométrico, aplicado en varios campos científicos y técnicos, que describe la relación entre volumen y área de un cuerpo a medida que aumenta o disminuye su forma o figura. Fue descrita por primera vez en 1638 por Galileo Galilei en su libro Dos nuevas ciencias: Discorsi e Dimostrazioni Matematiche, intorno a due nuove scienze.
En términos generales este principio establece que, cuando una forma crece en tamaño, su volumen crece más rápido que su superficie. Cuando se aplica al mundo real, este principio tiene muchas implicaciones que son importantes en campos que van desde la ingeniería mecánica a la biomecánica. Esto ayuda a explicar gran variedad de fenómenos, por ejemplo el porqué a grandes mamíferos como los elefantes les cuesta más enfriarse, que a los más pequeños como los ratones, y por qué hay límites fundamentales para el tamaño de los castillos de arena .- .....................................:http://es.wikipedia.org/w/index.php?title=Especial:Libro&bookcmd=download&collection_id=b40c41e4ff0a312f22e0f5299cb772fe51daee40&writer=rdf2latex&return_to=Ley+cuadr%C3%A1tico-c%C3%BAbica
Esta cuestión da para mucho, pero podemos basarnos en una simple ley matemática para realizar nuestras conjeturas. Cuando un objeto tridimensional cambia su tamaño, su superficie y su volumen no crecen de forma lineal. Pongamos un ejemplo para que quede claro. Imaginemos una pequeña pelota, que aproximamos por una esfera. Todos conocemos la fórmula de la superficie de una esfera:

Donde r es el radio de la misma. ¿Qué pasa si aumentamos el radio en un factor 2? Como la superficie crece de forma cuadrática con el radio, nuestra nueva superficie será:
^2=4 \times \pi \times 4 \times r^2=4\times S")
Para el volumen tenemos algo similar, pero en lugar de aumentar de forma cuadrática, lo hace de forma cúbica:

^3=\frac{4}{3} \times \pi \times 8\times r^3=8\times V")
Esta propiedad, por la cual la superficie y el volumen de un objeto tridimensional crecen con proporciones distintas se denomina ley cuadrático-cúbica, y fue descrita por Galileo en el año 1638 en su tratado Discorsi e dimostrazioni matematiche, intorno à due nuove scienze (Discurso y demostración matemática, en torno a dos nuevas ciencias). Esta ley, que puede parecernos algo sencillo y evidente, tiene implicaciones en multitud de ciencias, como la biomecánica o las ingenierías.
Si pensamos seres de grandes dimensiones, como los kaijus o los jaegers, podemos formular varias pegas para su existencia. Podríamos agrupar estas pegas en dos grandes grupos: biológicas y mecánicas, aunque en el fondo están bastante relacionadas.
Consideraciones biológicas
Obviamente, esto solo aplica a los kaijus. La lista podría ser muy extensa, pero los principales motivos en contra de la viabilidad de los monstruos gigantes se reducen a la energía que necesitarían para mantenerse vivos.
Cualquier ser vivo necesita alimentarse. Cuanto más complejo es el ser vivo, más energía necesita para realizar con normalidad todas sus funciones. Desde los insectos más pequeños hasta los grandes mamíferos, todos necesitan conseguir energía del medio que los rodea. Por norma general, cuanto mayor es el tamaño de un animal, más alimentos debe ingerir para mantenerse en un buen estado físico y sobrevivir. Para extraer los alimentos del entorno, los seres vivos tienen que moverse y recolectar (como hacen los insectos con las flores) o cazar otros animales. Aunque pueda no parecerlo, este hecho juega un papel en las dimensiones que toman los seres vivos. Existe un compromiso entre las dimensiones que tiene un individuo y el gasto energético que le supone recolectar o cazar un sustento. Si midiendo un poco menos necesitas cazar sólo un animal en vez de dos, serás mucho más eficiente y tendrás más posibilidades de sobrevivir.
Entonces, ¿tienden los animales a ser pequeños para no tener que alimentarse mucho? Bueno, desde este punto de vista todo indica que cuanto menor es la dimensión de ser vivo, menos energía requiere para desplazarse y conseguir alimento. Sin embargo, este es sólo un factor a tener en cuenta, ya que el tamaño puede aportar un sinfín de ventajas que suplen este aumento en el gasto energético (como puede ser la seguridad frente a depredadores, o la posibilidad de acceder a mejores fuentes de comida).
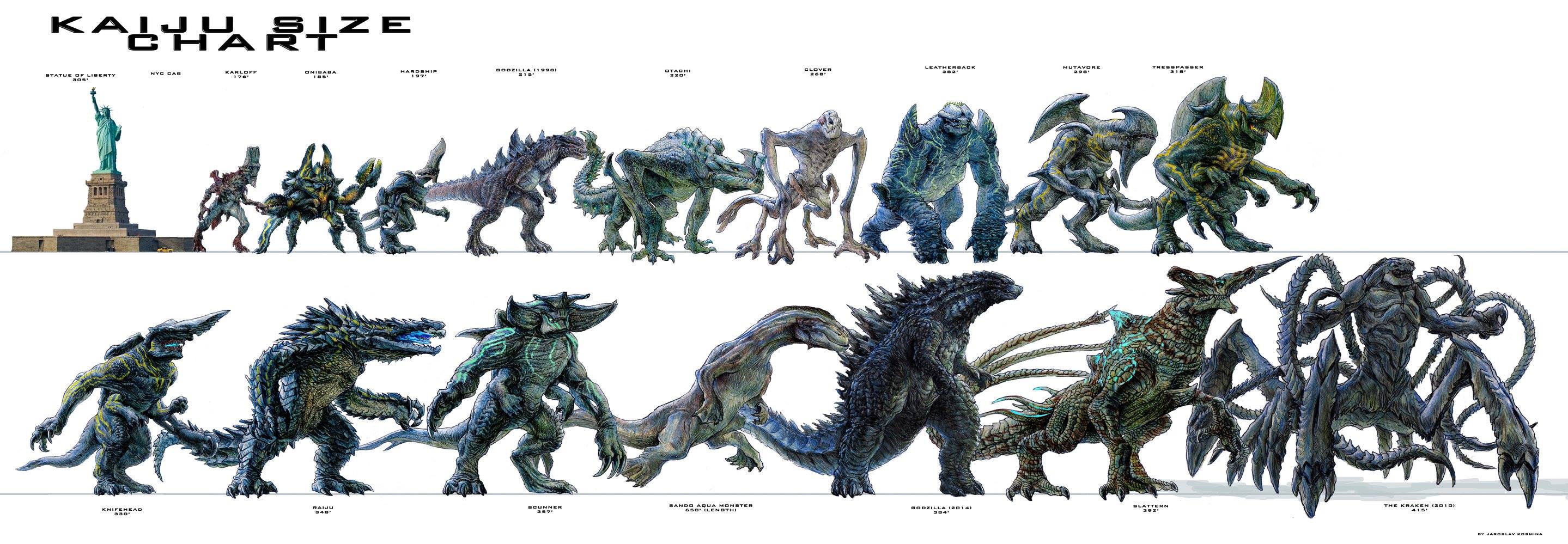
Comparativa de tamaños de los kaijus más famosos de los últimos años
Dicho esto, ¿sería posible la existencia de un animal como Godzilla desde el punto de vista biológico? La respuesta es que no, ya que la cantidad de víveres que necesitaría para vivir sería tremendamente elevada. Para hacernos una idea de lo complejo que puede llegar a ser conseguir alimento, vamos a poner un ejemplo. Las ballenas, los grandes mamíferos marinos, necesitan grandes cantidades de plancton para subsistir. Una ballena gris puede medir hasta 15 metros de largo y pesar 35 toneladas, y cada día necesita alrededor de una tonelada de alimento. Las ballenas grises realizan migraciones cada año en busca de víveres que llegan a ser de hasta 15.000 km de ida y vuelta (desde Rusia hasta California). Sin embargo, la ballena gris es insignificante si la comparamos con un kaiju estilo Godzilla. En la película del año pasado, el tamaño de Godzilla rondaba los 150 metros de alto. Es decir, una longitud 10 veces mas larga que el de una ballena gris. La energía requerida para moverse no sería diez veces mayor que la de la ballena, sino mucho mayor (recordemos que el volumen de un cuerpo no crece de forma lineal con el tamaño). La cantidad de alimento que necesitaría obtener sería imposible de conseguir en un planeta como el nuestro. Además, Godzilla no va nadando, sino que es capaz de caminar por tierra, lo cual nos lleva al siguiente punto.
Consideraciones mecánicas
Aquí no solo tiene problemas nuestro kaiju favorito, sino también los robots gigantes como Ultraman o los jaegers de Pacific Rim. Lo primero de todo, cualquier ser vivo o robot que necesite mantenerse a 2 patas va a necesitar mantener el equilibro. Esto fuerza una morfología por si mismo. Además, si ese organismo se mueve a dos patas, necesitará un sistema de articulaciones (rodillas, tobillos, caderas, etc.) preparado para permitirle hacer dichos movimientos, y sobretodo para soportar las cargas estructurales que estos necesitan.
La pronosupinación es un movimiento complejo del pie, o más detalladamente, de la artiuclación subastragalina del pie. La alta dependencia funcional de las articulaciones que componen el tobillo y la dirección de los ejes de movimiento de las mismas hace muy complicado aislar los distintos movimientos del pie. Un movimiento de flexión-extensión implica movimientos de eversión/inversión y de abducción/aducción. EL movimiento de pronosupinación se compone de todos estos movimientos. Por ello se habla demovimiento de pronación a la combinación de: flexión, abducción y eversión, por el contrario el movimiento de supinación es la combinación de los movimientos de: extensión, aducción e inversión. No obstante la terminología es un poco confusa y según el texto consultado: anatómicos o biomecánicos, los términos eversión/inversión y pronación/supinación se alternan, para referirse al movimiento combinado que se da alrededor del eje oblicuo descrito por Henke que representa el movimiento de las articulaciones subastragalina y mediotarsiana (Kapandji, 2010).1 Existe una tendencia a hablar de eversión/inversión cuando el movimiento del pie es en cadena abierta, sin apoyo, y pronación/supinación cuando se trata de cadena cerrada, pie apoyado.- ............................:http://es.wikipedia.org/w/index.php?title=Especial:Libro&bookcmd=download&collection_id=6cb68e3156d928e7c60aa011b4b88697ed3eefab&writer=rdf2latex&return_to=Pronosupinaci%C3%B3n+del+pie+en+carrera
La articulación TIBIO-TARSIANA, está formada por elementos pertenecientes a la pierna (tibia y peroné) y al pie (astrágalo). La tibia y el peroné encierran el astrágalo en lo que suele llamarse la mortaja o pinzaTibia-peronea. Las prominencias óseas de sus extremos dístales se denominan maleolos. La tibia y el peroné están unidos por potentes ligamentos que impiden su separación aunque permiten cierta movilidad pasiva. El astrágalo queda encerrado en estas paredes, la tibia por medial y el maleolo peroneo por lateral, de tal manera que solo se le permite un grado de libertad de movimiento, fexoextensión.
Articulaciónastrágalo-calcárea o subastragalina.
Articulación subastragalina
 EJE DE HENKE |
Se distinguen dos articulaciones: la posterior, la mas grande, que articula ambos cuerpos óseos, la subastragalina anterior, que articula la apósifis anterior del calcáneo sustentaculutali, con el cuello y la cabeza del astrágalo. Entre ambas articulaciones queda un espacio, no articular, llamado seno del tarso. La articulación subastragalina es la primera articulación del pie, formada por el astrágalo por arriba y el calcáneo por debajo. En esta articulación se realiza la pronosupinación del pie. El astrágalo se apoya en dos carillas articulares: la posterior, más amplia y la anterior, que presenta por parte del calcáneo una apófisis por su cara medial. Se denomina sustentaculum tali.
La movilidad de la subastragalina no se realiza en un solo plano. Por el contrario, el movimiento de prono-supinación se ejecuta en tres planos, de tal manera que en la pronación:
a) el astrágalo cabecea sobre el calcáneo b) rota sobre un plano horizontal hacia medial c) y se desliza hacia delante.
Realmente se supone que el astrágalo se encuentra fijo en la mortaja tibio-peronea. Los movimientos de la subastragalina los realiza el calcando. Suelen resumirse en términos náuticos, diciendo que este hueso en la pronación-supinación rola, vira y cabecea.
El eje común de este triple movimiento de la articulación subastragalina, se denomina eje de Henke. Como el escafoides y cuboidesescafoides y cuboides siguen los movimientos de la subastragalina, conjuntamente este eje representa también el eje de movimiento de la articulación de Chopart.
Resumen movimientos articulación subastragalina.
Pronación del Talón
|
Supinación del Talón
|
|---|---|
| Flexión dorsal del pie. | Flexión Plantar del pie- |
| Aducción del calcáneo. | Supinación del calcáneo |
| pronación del calcáneo. | Aducción del calcáneo |
| Desplazamiento anterior del calcáneo. | Desplazamiento posterior del calcáneo. |
Articulaciónastrágalo-escafoidea. Esta articulación forma una semicircunferencia prolongada por la cápsula y los ligamentos de refuerzo. La cabeza del astrágalo es un segmento de esfera que se corresponde perfectamente con la concavidad del escafoides.
Articulacióncalcáneo-cuboidea. Es una articulación plana. Una línea imaginaria que se prolonga por la articulación calcáneo-cuboidea y sigue por la articulación astrágalo-escafoidea, describiendo una doble curva en forma de S muy alargada que se denomina generalmente articulación de Chopart. (limite del retropié con el mediopié).
Articulaciónescafo-cuneana. El escafoides articula por delante con la primera, segunda y tercera cuña.
Articulacióncubo-cuneana. Articula el cuboides con el quinto y cuarto metatarsiano, y la tercera cuña.
Articulacióntarso-metatarsiana. La línea imaginaria que resulta de unir las líneas articulares de las articulaciones cuneo-metatarsiana y cuboideo-metatarsiana se denomina articulación de lisfranc. Es el limite del mediopié con el antepié.
Articulaciones metatarso-falángicas. Son las articulaciones de cada metatarso con su correspondiente falange. La más importante funcionalmente es la comprendida entre el primer meta y la primera falange del primer dedo. Esta articulación es la mas importante después de la subastragalina. Solo tiene un grado de libertad de movimiento flexo-extensión. La extensión dorsal de la primera falange se realiza pasivamente en el momento de iniciar el despegue del suelo del pie. Debe alcanzar unos 30 o 40 grados. La flexión plantar se realiza por acción de un músculo muy potente. El flexor propio del dedo gordo, fundamentalmente para despegar el pie del suelo (el antepié) durante la marcha y especialmente al andar de puntillas o en la carrera. Esta articulación es asiento frecuente de deformidades (Hallux Valgus) o localización de enfermedades (gota, artrosis) altamente invalidantes.
Las otras articulaciones metatarso-falángicas juegan menos papel en la marcha. Sin embargo también sufren alteraciones mecánicas cuando se produce un desbalance funcional entre el sistema de músculos extensores-flexores(dedos en garra, dedos en martillo) que pueden ser manifestaciones únicas o acompañar a otras alteraciones del pie (pie cavo que acompaña dedos en martillo).
Articulaciones interfalángicas. Próximales entre la primera y segunda falange y dístales entre la segunda y la tercera falange.
No hay comentarios:
Publicar un comentario